2012 - 2013 : Artificial intelligence with a robot
Summary
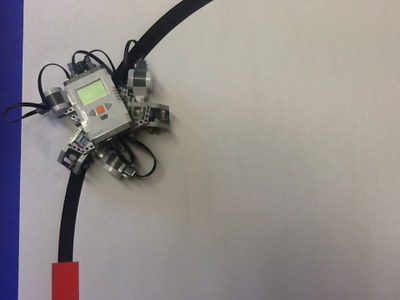
The general topic is artificial intelligence and applications to a real robot, build upon the Lego Mindstorms set. A basic robot has been provided to us and the problem the robot has to learn solving is path following. We were therefore asked to program a robot that can follow paths on a printed arena using artificial intelligence methods like neural networks. The arena is a large piece of paper with black stripe on a white background, with color codes for limits, and specific tasks like stops or reverse.
Hard-coding of path following algorithms will require some fine-tuning to deal with slightly different configurations or environmental change, and cannot deal with a new task without substantial recoding. At the opposite, artificial intelligence approaches are based on a few simple basic functions, are more robust against change of tasks, environmental changes and their implementation require slight modifications to deal with new tasks. The problem with artificial intelligence lies in the learning phase, which is computationnally expensive and cannot often be performed on the real robot, making the need of a robot simulator unavoidable.
State of the art
Our project is about programming a Lego Mindstorms robot using artificial intelligence techniques in order to solve problems by learning by itself.
We have started our project on the 18th of February. We first built a simple Lego robot and programmed the first basic movements (move backwards, forwards, to the left, to the right,...) in order to get confident with the NXC-language used in this project. We also learned to use some Lego Mindstorms sensors such as the touch, light or infrared sensors.
In a second phase, our aim was the programming of a line following algorithm using simple commands without any artificial intelligence (basically using while and if-then-else commands). In spite of some bugs (it sometimes takes the wrong direction), our robot works pretty well and we are quite happy with our first results. Have a look at the videos of our robot performing so me line-following tasks on different test pads!
In the same time, we started programming a simulator which serves to test new codes and instructions virtually. That saves a lot of effort and time and will be particularly helpful when we start considering artificial intelligence.
We chose to implement our simulator in Matlab by traducing the high-level algorithms of our robot in the Matlab language. As you can see in the video below, the virtual robot has the same behaviour as the real one.
The main difficulties were the modelling of the environment as well as the noisy behaviour that appears in the real world (wrong outputs generated by the color sensor, especially at the pattern boundaries).
About us
Hi!
My name is Martin Gueuning, I come from Froyennes, near Tournai and I was born on the 9th of October 1990.
I am currently studying Mathematics at the University of Namur. I passed my dissertation on January about stochastic propagation on dynamical networks.
I really enjoyed my five years in the department of mathematics since I have always been interested in the mathematical approach of the world which I consider to be a mix of precision and game. I am always fascinated by how close can be modelisation from real world.
I like football (come on RCSC!), chess (come on 521 !), music,... I am also involved in a students' house with common project for 4 years.
If you want to get in touch, feel free to send me an email to students-fs@math.unamur.be.
I promess to answer as soon as possible! ;)
Cheers!
Hi,
I am Sebastian Bach. I come from a small village in the German-speaking area of Belgium called Medell. I was born on the 22nd of February 1990.
I am a student in the second year of the master program of Applied Mathematics at University of Namur. I wrote my dissertation about the missing link problem in network theory.
I have really enjoyed my last 4 years here in Namur because of the familiar atmosphere and the close contacts between students, assistants and professors. It helped me a lot to get confident in an environment where my mother tongue is not spoken.
I'm always impressed by the huge field of real world applications from mathematical methods.
I spend my free time doing a lot of sports (especially Basketball and Krav Maga) and I am a passionate supporter of Bayern München. I am also involved in a student's union called "Destuna".
Don't hesitate to contact me by sending an email to students-fs@math.unamur.be.
Enjoy our website :-)